Mechanical Design | Humanoid Robots | Onshape
Actuator Selection | Torque Analysis
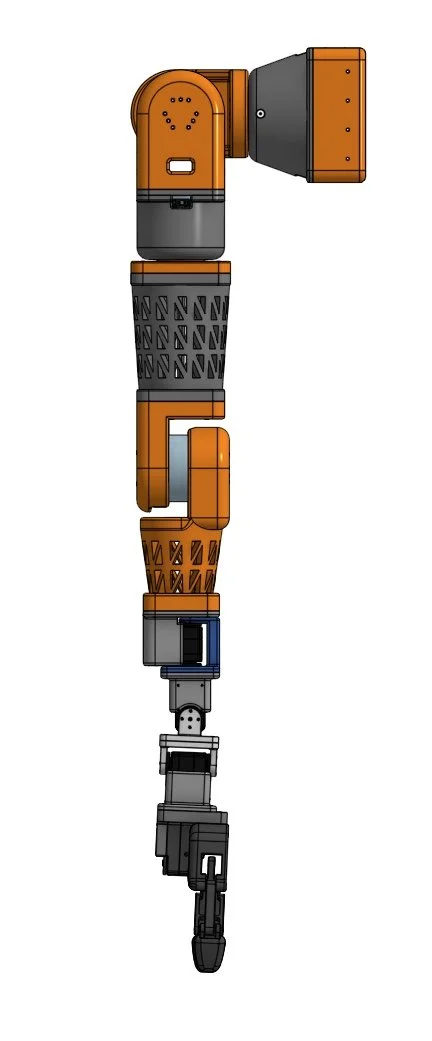
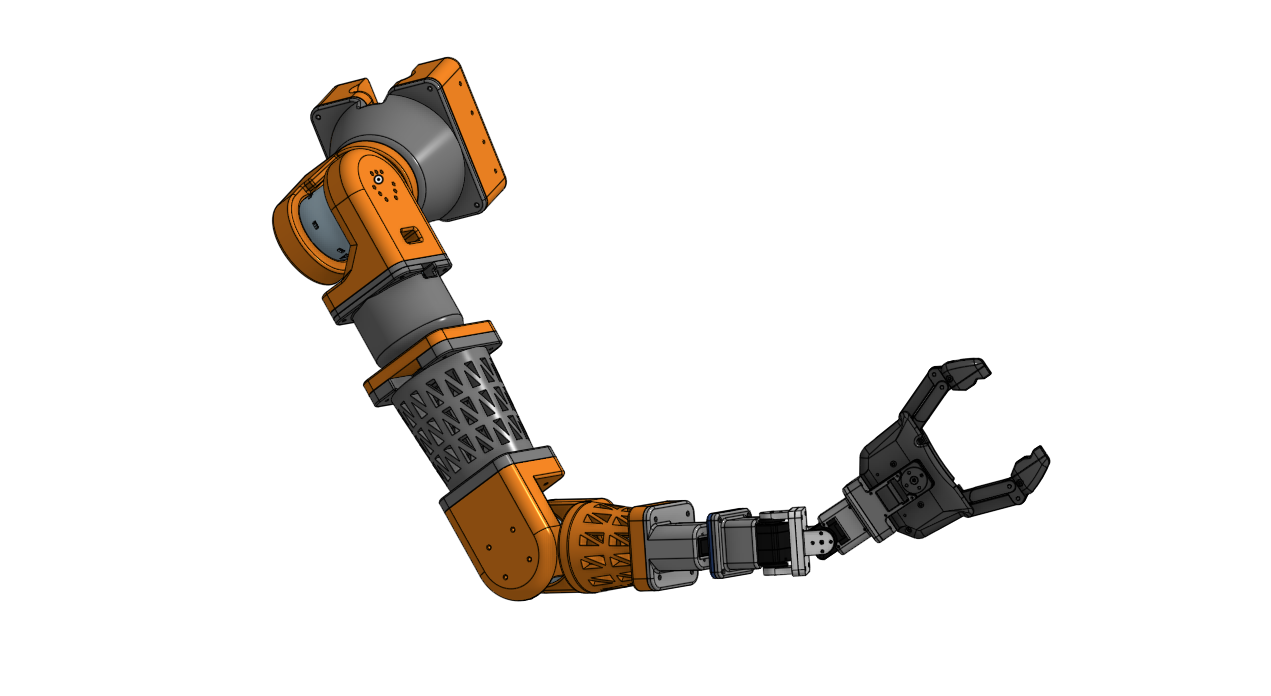
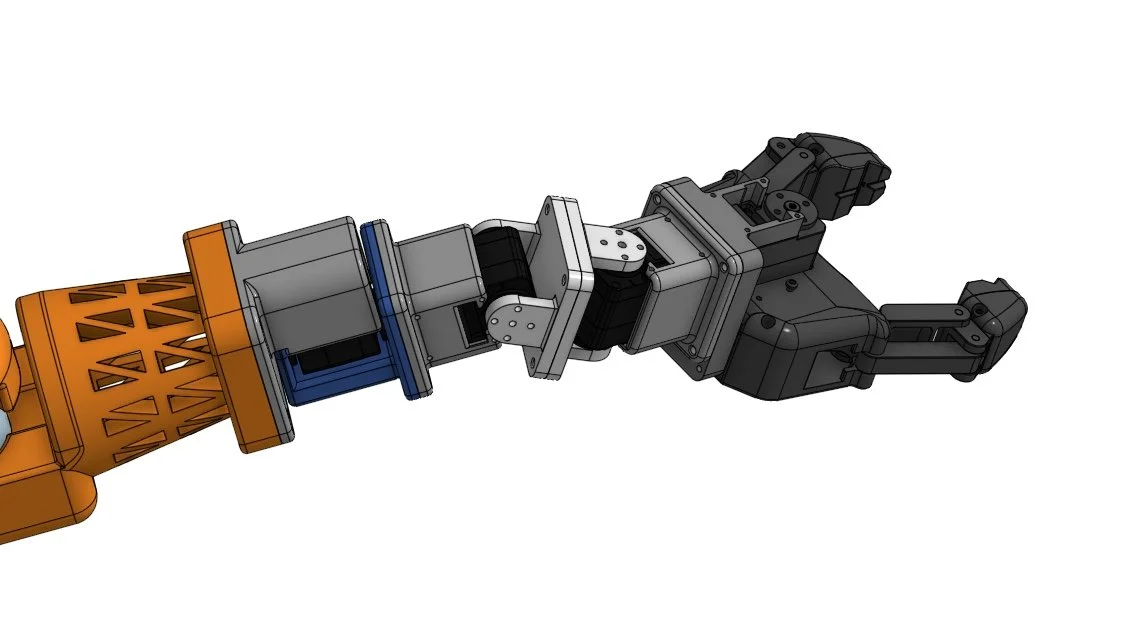
7-DOF Humanoid Robot Arm
Having been fascinated by the all designs of humanoid robots that launched in 2025, I wanted to learn more about robot hardware design by building my own humanoid robot arm!
To make the design more intuitive to teleoperate, I got design requirements like the arm reach, linkage lengths, and joint positions from my own arm.
I did sample torque calculations to understand target payload, sized and selected actuators, and did some FEA to validate the structural strength of my arm links. I also learnt about the challenges associated with dynamic wire routing, motor backlash, and reflected inertia,
More details to follow soon!